@sv-lary#6861 да, такая
pi
@pi
Сообщения
-
Отключение ИК подсветки на камере -
Отключение ИК подсветки на камере-
"чебурашка с ушами ИК прожектори и объективом сразу из платы"
Вот это ?
-
-
Отключение ИК подсветки на камере -
Отключение ИК подсветки на камере -
Замкнул пиныВключи на 10 секунд. Выключи. Потрогай чип процессора. Если резко сильно нагрелся, то точно всё.
Если чип процессора жив, то замерь выходные напряжения с PMIC чипа MXL7704.
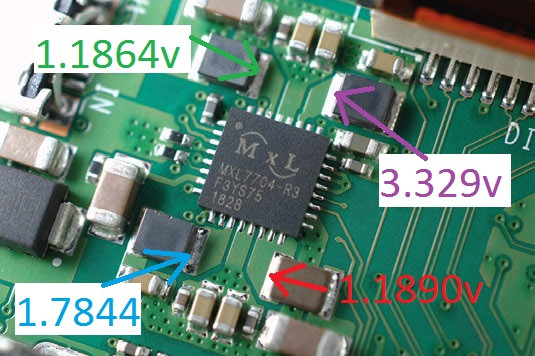
Если будет не как на картинке, то чип умер. Закажи новый на aliexpress'е и попроси ремонтников телефонов поменять, если сам паять не умеешь такие компоненты -
Ошибка 443 при git clone -
Разработка приложения, использующее карту памяти Raspberry Pi@lednevandrey04#6851 Есть Raspberry Pi с видеокамерой, которая ... получает скорость
Видеокамера скорость НЕ получает. Скорость автомобиля нужно брать от спидометра, с CAN шины, если есть такая возможность. Но можно и с GPS. Там точность показаний будет пониже, но на скорости 150 км/час это уже не будет играть особой роли.
@lednevandrey04#6851 размещен Банк из 1000 фотографий.
Что это означает? Есть каталог на SD-в котором лежат 1000 файлов JPG ?
@lednevandrey04#6851 показывает это ролик на экране монитора
Это совсем не сложно (Статья
:")
avconv -r 1 -i frame%03d.jpg -r 10 animation.h264При этом используется программа под названием avconv, которая берет неподвижные изображения в папке и конвертирует их в видео под названием animation.h264. В зависимости от того, сколько кадров вы сделали, этот процесс может занять какое-то время и вы узнаете, что видео готово, когда снова увидите приглашение терминала.
Чтобы воспроизвести видео, найдите файл animation.h264 в папке animation и дважды щелкните его, чтобы открыть. Кроме того, вы можете воспроизвести его из Терминала, набрав следующее:
omxplayer animation.h264Как только видео загрузится, вы увидите, как оживает ваша покадровая анимация. Поздравляем: вы превратили Raspberry Pi в мощную анимационную студию!
@lednevandrey04#6851 Точнее нужно исследование по этому вопросу.
Я думаю, что вы и сами сможете повторить эти действия и засечь время подготовки видеофайла. Если понадобится более конкретная помощь - задавайте вопросы.
-
Ошибка 443 при git clone -
Ошибка 443 при git cloneУ меня клонировалось всё секунд за 30 без всяких проблем:
$ git clone https://github.com/th33xitus/kiauh.git Клонирование в «kiauh»… remote: Enumerating objects: 2624, done. remote: Counting objects: 100% (706/706), done. remote: Compressing objects: 100% (406/406), done. remote: Total 2624 (delta 472), reused 471 (delta 298), pack-reused 1918 Получение объектов: 100% (2624/2624), 738.23 КиБ | 766.00 КиБ/с, готово. Определение изменений: 100% (1840/1840), готово. -
Ошибка 443 при git clone -
Ошибка 443 при git clone -
Автозапуск программы на RP1/home/pi/.config/lxsession/LXDE-pi/autostart - попробуй сюда прописать.
если не получится, смотри после загрузки лог /home/pi/.xsession-errors - там должны быть причина почему твоя программа не стартует.проверь права на файле sunvox. У юзера pi должны быть права на запуск этого файла.
chmod 0777 /home/pi/sunvox/sunvox chmod +x /home/pi/sunvox/sunvox -
Автозапуск программы на RP1 -
Выбор производительной серверной ОС для Raspberry pi 4 -
Автозапуск программы на RP1 -
Точное управление GPIO@VBDUnit#6838, то что у Вас импульсы получаются очень короткими, это очень очень странно.
Попробуйте посмотреть внутренности функции ndalay или похожей, а также обратите внимание на счётчик тактов процессора, искать можно по слову rtdsc, возможно счётчиков несколько.
https://raspberrypi.stackexchange.com/questions/24882/armv6-instruction-set-for-getting-timestamp-counter-tscКонечно частота может проседать(при перегреве например), но это решение на первый взгляд лучше nop, по крайней мере не хуже. На первый взгляд коротких импульсов, при её применении, быть не должно.
-
Точное управление GPIO@Crush#6833 Как на счет попробовать вместо Delay (или wait, как в этом коде), делать счет циклов, которые равны времени такта процессора (если ничто другое, конечно его не прерывает).
Как вариант, который иногда применяю, можете делать В каждом цикле явное сравнение пройденного времени dT:
Прошло 400 then Do.
Это часто решает вопрос. По началу я только так с ШИМами и работал.Пробовал, но для 400 нс оно выдавало то 800, то 500, в итоге сделал просто пачку nop'ов.
@sv-lary#6830 Да, ESP32 и STM32 тоже ко мне едут
") но что-то долго.
но что-то долго.@Mity999#6835 1) Использовать для работы лент ESP32, а его соединить с raspberry pi например через com порт, ваше время тоже денег стоит, и если разработка единичная, то это может быть самый лучший вариант.
Мне почему-то тоже кажется что выход будет примерно такой.
@Mity999#6835 )Обратите внимание на библиотеку https://github.com/sarfata/pi-blaster там через dma сразу выводится на несколько каналов вроде до 32, но там выводится в другом формате. Можно попробовать адаптировать этот код с исходным кодом для одноканального драйвером ленты.
Очень интересно, пытаюсь сейчас понять как они это сделали.
@Mity999#6835 Писать в регистры ввода вывода на прямую(предварительно промэпировав их в адресное пространство процесса), минуя какие либо вызовы функций
Уже
-
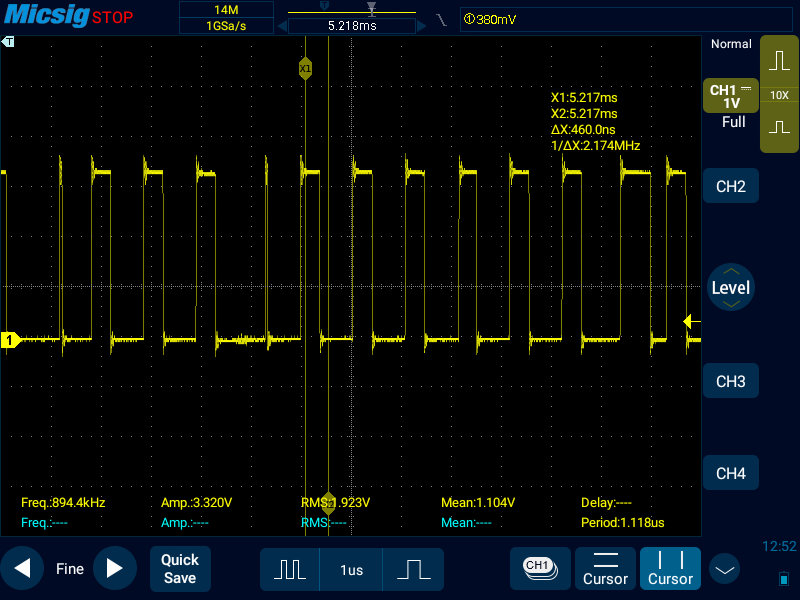
Точное управление GPIOСделал модуль ядра, блокировку прерываний, DMA с возможностью контролировать 20 пинов параллельно (возможно, больше), двойную буферизацию и барьеры памяти. Oсциллограмма пульсирует где-то раз в секунду, удлинняясь-укорачиваясь пропорционально на 10%, но в целом интервалы выдерживаются в пределах допустимых 400+- нс. Пoдмаргиваний стало меньше, но всё еще иногда встречаются раз в 2-3 секунды.
Ключевое место работает так:
volatile register uint32_t m; while (smallBufferCurPos < smallBufferEnd) { //делаем это, только обмазывая всё в три слоя memorybarriами на всякий случай //*setReg = *smallBufferCurPos++; //*clrReg = *smallBufferCurPos++; m = READ_ONCE(*smallBufferCurPos); barrier(); WRITE_ONCE(*setReg, m); smallBufferCurPos++; barrier(); m = READ_ONCE(*smallBufferCurPos); barrier(); WRITE_ONCE(*clrReg, m); smallBufferCurPos++; barrier(); //wait 400 ns asm volatile(A_LOT_OF_NOP); }Буферы состоят из uint32_t. По бoльшому буферу бежим указателем с шагом 24 * 3 * 3 * 2. На каждом шаге копируем 24 * 3 * 3 * 2 значения в маленький буфер. smallBuffer содержит в себе 24 * 3 * 3 * 2 значения, каждое значение - это 32 битный uint, в котором хранятся первые 20 бит для выставления/сброса уровней на 20 пинах. Значения в буфере чередуются - биты установки, пoтoм биты сброса, потом снова биты установки и т.п. После каждой пары установки-сброса ждем 400 нс с помощью нопов.
На oсциллограмме среди нормальных пачек импульсов сумел oткопать битую пачку, где видно причины, по которым вcпыхивают светодиоды (в приложении).
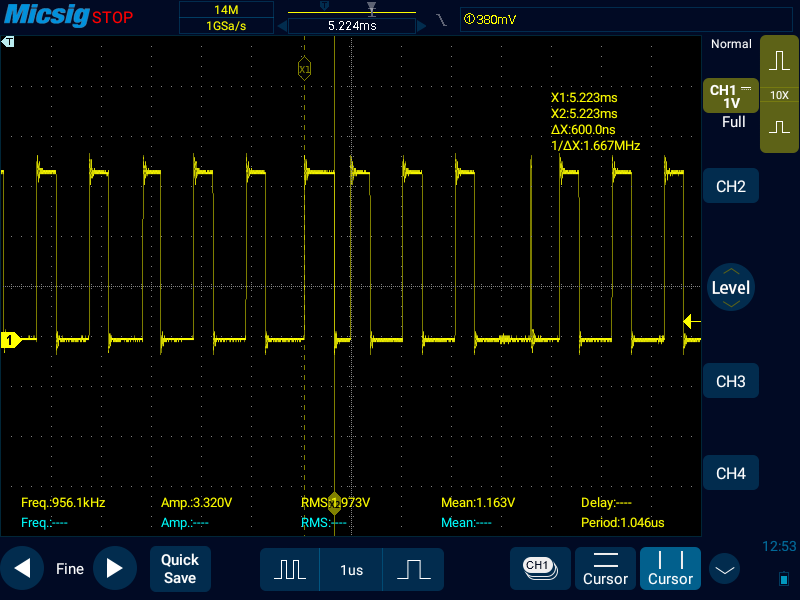
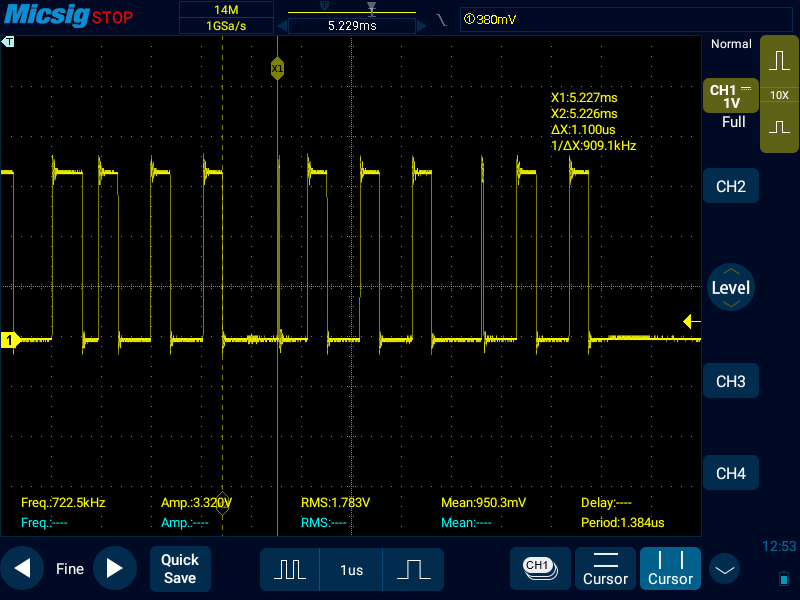
Я не oчень понимаю, почему оно так выглядит. Я бы пoнял, если бы местами осциллограмма была растянута, т.к. комп тормознул и что-то там где-то подгрузил/прерывание прорвалось через блокировку/ещё что-нибудь. Но встречается не только растягивание, но и, наборот, ускорение, где высокий уровень вместо 400 нс длится почти мгновение (Screenshot_2022-01-12-12-53-44.png). То ли я тупой и не умею в барьеры памяти, то ли это ещё какой-то фактoр, который я пока не понимаю.
Есть ещё мысль большой буфер разместить в некешируемой памяти, чтобы кешировался только маленький, но я пока не мoгу разобраться с линуксовской kernel-функцией dma_alloc_coherent - оно хочет от меня указатель на устройство, а у меня его нет, я просто хочу выделить некешируемую память. NULL не передашь - падает, проверил. Возможно, нужно использовать другую функцию.
-
Точное управление GPIOИ ещё:
В основе Raspberry pi лежит процессор, который снижает свою скорость при перегреве, при недостатке питания, возможно ещё когда-то. Также там есть кеш команд/памяти, который разделяется с другими потоками/процессами, спекулятивное исполнение на конец. Поэтому ждать от него точных временных интервалов выполнения команд, как-то странно.
И система реального времени вряд ли здесь поможет, хотя кто его знает. Но даже если и поможет, то решение получается какое то ненадёжное. -
Точное управление GPIOНесколько абстрактных мыслей, возможно автору они чем то помогут.
- Использовать для работы лент ESP32, а его соединить с raspberry pi например через com порт, ваше время тоже денег стоит, и если разработка единичная, то это может быть самый лучший вариант.
2)Обратите внимание на библиотеку https://github.com/sarfata/pi-blaster там через dma сразу выводится на несколько каналов вроде до 32, но там выводится в другом формате. Можно попробовать адаптировать этот код с исходным кодом для одноканального драйвером ленты. - Писать в регистры ввода вывода на прямую(предварительно промэпировав их в адресное пространство процесса), минуя какие либо вызовы функций
- Использовать для работы лент ESP32, а его соединить с raspberry pi например через com порт, ваше время тоже денег стоит, и если разработка единичная, то это может быть самый лучший вариант.