Приветствую!
Сегодня я расскажу, как на ferro_remote удаленно сделать i2cdump. i2cdump это мелкая утилита, которая берет номер шины I2C, адрес устройства и дампит на консоль значения всех его регистров.
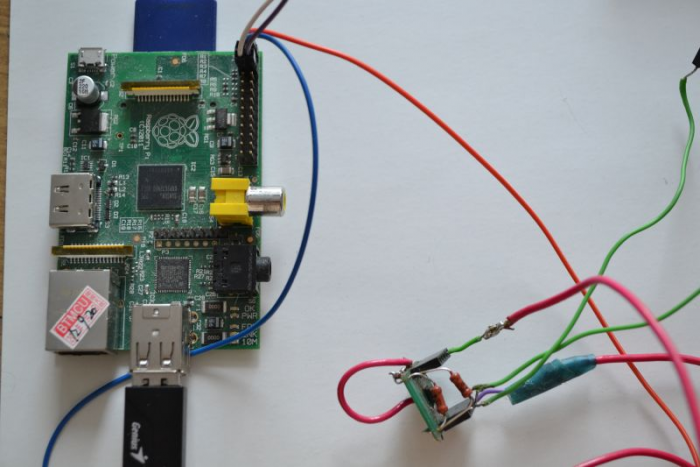
Для примера я возьму акселерометр на чипе mma7660fc. К большому сожалению девайс издох, и поэтому показывает всякую хрень вместо нормальных значений. Хотя есть вариант, что я что-то не так сделал с подключением. Но так как раньше он работал исправно, считаю, что он сломан. Но не важно. Сломаность акселерометра не мешает показать работу i2cdump.
Я уже его воткнул, включил (установка 7 регистра в значение 1) и делаю штатный вызов на самой распберри: 0x4c - адрес устройства (можно получить при помощи i2cdetect, например)
$ sudo i2cdump -y 1 0x4c
No size specified (using byte-data access)
0 1 2 3 4 5 6 7 8 9 a b c d e f 0123456789abcdef
00: 18 18 18 18 18 18 18 18 18 18 18 18 57 17 17 17 ????????????W???
10: 17 17 17 17 17 17 17 17 17 17 17 17 17 17 17 17 ????????????????
20: 17 17 17 18 18 18 18 18 18 18 18 18 18 18 18 18 ????????????????
30: 18 18 18 18 18 18 18 18 18 18 18 18 17 17 17 17 ????????????????
40: 17 17 17 17 17 17 17 17 17 17 17 17 17 17 17 17 ????????????????
50: 17 17 17 17 18 18 18 18 18 18 18 18 18 18 18 18 ????????????????
60: 18 18 18 18 18 18 18 18 18 18 18 18 18 18 18 18 ????????????????
70: 18 18 18 18 18 18 18 18 18 18 18 18 18 18 18 18 ????????????????
80: 18 18 18 18 18 18 18 19 19 19 19 19 19 19 19 19 ????????????????
90: 19 19 19 19 19 19 19 19 19 19 19 19 19 19 19 19 ????????????????
a0: 19 18 18 18 18 18 18 18 18 18 18 18 18 18 18 18 ????????????????
b0: 18 18 18 18 18 18 18 18 18 18 18 18 18 18 18 18 ????????????????
c0: 18 18 18 18 18 18 18 18 18 18 18 18 18 18 18 18 ????????????????
d0: 18 58 17 17 17 17 17 17 17 17 17 17 17 19 19 19 ?X??????????????
e0: 19 19 19 19 19 19 19 19 19 19 19 19 19 19 19 19 ????????????????
f0: 19 19 19 19 18 18 18 18 18 18 18 18 18 18 18 18 ????????????????
Как видно в регистрах мусор.  А раньше там были вполне годные данные.
А раньше там были вполне годные данные.
Вот теперь такую же картинку я получу при помощи lua_client с малины.
И так скрипт, который считает данные с устройства
i2c = fr.client.smbus -- алиас
function main( )
local dev = assert(i2c.open(1, 0x4c)) -- откроем шину и установим адрес 0x4c
local request = { } -- таблица с запросом. См. пояснение после кода.
for i=0, 255 do
table.insert( request, i ) -- таблица просто содержит значения от 0 до 255
end
local dump = assert(dev:read_bytes( request )) -- вызов. если он успешен,
-- в dump мы получим таблицу, в которой будут записаны значения каждого регистра.
while i < 256 do -- просто выведем все значения
print( i, " = ", dump[i] )
i = i + 1
end
end
Про таблицу в запросе read_bytes.
Так как вызов у меня не локальный (я читаю с удаленной системы), у меня есть возможность запросить сразу несколько значений регистров устройства за один вызов, чтоб делать меньше запросов к удаленной системе. Можно спрашивать по одному, но это будет медленнее.
Данный, не слишком длинный и сложный код, читает и выводит значения всех регистров устройства.
$ ./lua_client -s 192.168.1.11:12345 -e i2cdump.lua
0 = 23
1 = 23
2 = 23
......... skipped .......
254 = 24
255 = 24
Собственно это все, что от него требовалось, но, немного прикрутив форматирование:
i2c = fr.client.smbus
function main( )
local dev = assert(i2c.open(1, 0x4c))
local request = {}
for i=0, 255 do
table.insert( request, i )
end
local dump = assert(dev:read_bytes( request ))
-- выведем красивую табличку с hex значениями
io.write( " 0 1 2 3 4 5 6 7 8 9 a b c d e f",
" 0123456789abcdef\n")
local i, r, str = 0, 0, ""
io.write( "00: " )
while i < 256 do
local b = dump[i]
io.write( string.format('%02X ', b ) )
str = str..string.char(b)
i = i + 1
if i % 16 == 0 then
r = r + 16
io.write( ' ', str:gsub('%c','.'), '\n' )
str = ""
if i < 256 then
io.write( string.format('%02X: ', r ) )
end
end
end
end
Всё! ") Получили почти аналог i2cdump.
Получили почти аналог i2cdump.
PS:
$ ./lua_client -s 192.168.1.11:12345 -e i2cdump.lua
0 1 2 3 4 5 6 7 8 9 a b c d e f 0123456789abcdef
00: 18 18 18 18 18 18 18 18 18 18 18 18 18 18 18 18 ................
10: 18 18 18 16 16 16 16 16 16 16 16 16 16 16 16 16 ................
20: 16 16 16 16 16 16 16 16 16 16 16 16 16 16 16 16 ................
30: 16 16 16 16 16 57 17 17 17 17 17 17 17 17 17 17 .....W..........
40: 17 17 17 17 17 17 17 17 17 17 17 17 17 17 17 17 ................
50: 17 17 17 17 17 17 17 17 17 17 17 17 17 17 17 17 ................
60: 17 17 17 17 17 17 17 17 17 17 17 17 17 17 17 17 ................
70: 17 17 17 17 17 17 17 17 17 17 19 19 19 19 19 19 ................
80: 19 19 19 19 19 19 19 19 19 19 19 19 19 19 19 19 ................
90: 19 19 19 19 19 19 19 19 19 19 19 19 17 17 17 17 ................
A0: 17 17 17 17 17 17 17 17 17 17 17 17 17 17 17 17 ................
B0: 17 17 17 17 17 17 17 17 17 17 17 17 17 17 17 18 ................
C0: 18 18 18 18 18 18 18 18 18 18 18 18 18 18 18 18 ................
D0: 18 18 18 18 18 18 18 18 18 18 18 18 18 18 18 18 ................
E0: 18 18 18 18 18 18 18 18 18 18 18 18 18 18 18 18 ................
F0: 18 18 18 18 18 18 18 18 18 18 18 18 18 18 18 18 ................






")
")