Предыстория.
Нельзя сказать, что идея компактного беспроводного сервера с функциями хранения пользовательских файлов возникла и воплотилась в проекте τAURUS. В настоящее время на IT рынке присутствуют как беспроводные накопители типа Voyager Air, MobileLite, Wireless Air Bank, Air Drive, Connect Wireless Flash Drive, Wireless Plus, так и полноценные беспроводные и компактные NAS серверы типа Seagate STCR3000, Western Digital, My Cloud Synology DS115j, Corsair Voyager Air Home.
Если присмотреться к одним и другим, то беда одних заключается в ограниченном функционале, а других в стоимости. В тоже время, невероятной популярностью в любительских кругах стали пользоваться одноплатные компьютеры Raspberry Pi.
На базе такого решения профессор школы культуры, образования и человеческого развития Штейнгардт в Нью-Йоркском университете Дэвид Дартс (David Darts) сконфигурировал свое детище PirateBox. Сутью проекта Дэвида является наделение Raspberry Pi функциями автономного узла хранения и раздачи контента всем, кто имеет возможность подключиться к нему посредством Wi-Fi сети образованной самой Raspberry. Популяризация его идеи сразу вышла за пределы информационного ресурса Дэвида и оставила отпечаток во многих СМИ, в т.ч. в русскоязычном выпуске журнала Linux Format за 2016 год (статья «PirateBox на Pi»).
PirateBox оказался вполне работоспособным, но весьма ограниченным решением вопросов собственного карманного электронного хранилища и файлообменника. Более того, неудачный web-интерфейс и ограниченная программная функциональность, на практике свело к пользованию PirateBox только в качестве развлечения в кругу друзей.
Нам бы также только лучше. Под таким девизом были предприняты попытки модернизации PirateBox, которые по разным причинам не привели к каким либо значимым результатам, после чего и было принято решение разработки нового проекта без оглядки на PirateBox.
Идея.
А что собственно не устраивало в PirateBox?
Ключевыми минусами этого проекта является:
-
собственный web интерфейс с отсутствием удобоваримого файлового менеджера наделенного функциями «предосмотра», фильтров и критериев;
-
невозможность дистанционного управления файлами в собственном хранилище (данная возможность реализована только посредством использования команды ssh или непосредственным редактированием содержимого USB-flash носителя);
-
невозможность управления и настройки сервера посредством web-интерфейса;
-
отсутствие поддержки ряда стандартов мультимедиа и сетевых стандартов;
-
отсутствие автоматической загрузки web-интерфейса при первом подключении (функция реализована только методом перенаправления в браузере);
-
отсутствие поддержки работы с мультимедиа файлами «на лету»;
-
отсутствие распределения прав доступа, ну и других «плюшек», без которых сложно наладить комфортную работу с файлохранилищем.
Более того, не хватало еще одного – возможности удобного размещения собственных web-страниц для последующего мультиплатформенного тестирования и отладки где бы то ни было.
Все вышеперечисленные минусы должен был убить проект τAURUS.
Суть.
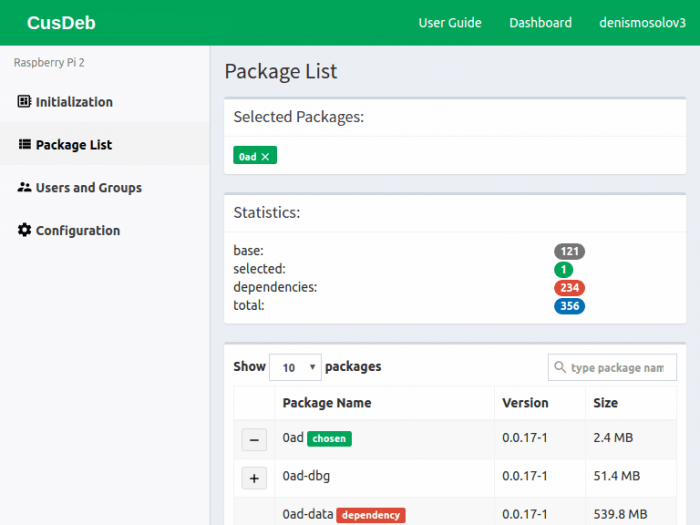
Итак, τAURUS – это автономное беспроводное портативное облачное решение, построенное на операционной системе Raspbian (Linux, Debian). τAURUS можно считать small server с
внешним USB 2.0 накопителем, аккумулятором до 4000 mAh и собственным многофункциональным интерфейсом.
Фактически мы хотели получить некое подобие NAS-сервера стоимостью в районе 40€ без учета стоимости flash накопителя USB (стоимость которого варьируется от 8€ за 16 Гб до 45€ за 128 Гб, накопители с размером памяти превышающем 128 Гб не рассматривались по причине резкого увеличения их стоимости) и стоимости microSD карты объемом 16 Гб (5€). Итоговая стоимость готового решения варьируется от 53€ до 90€.
Анализ существующих NAS-серверов представленных на рынке показал наличие единичных портативных экземпляров и стоимостью более 150€, такое стоимостное преимущество было еще одним толчком для развития проекта τAURUS.
Не будем скрывать, конкуренцию производителям NAS накопителей с объемом памяти от 512 Гб создать трудно, по одной простой причине – коммерческие твердотельные накопители с большим объемом памяти стоят достаточно серьёзных денег (от 160€), более того наличие USB 2.0 и средней скорости обмена технически проигрывают совершенным коммерческим решениям типа My Passport Wireless Pro Wi-Fi. Отчасти решением этой проблемы может стать применение SATA накопителей, что конечно повлияет на габариты и время работы τAURUS. Да и
сам проект задумывался в качестве хобби без намека на дельнейшую коммерческую реализацию.
Постановка задач.
- Конференции, деловые встречи и учебные классы - мгновенная многопользовательская организация хранения и раздачи электронных материалов.
- Потоковый просмотр мультимедиа - мультиплатформенный просмотр мультимедиа в любом удобном месте без привязки к наличию интернета.
- Удобное хранение - использование беспроводной сети и встроенного web-интерфейса для передачи, получения и хранения ваших файлов.
- Легкий доступ - сервер сам позаботится о загрузке web-интерфейса как только вы подключитесь к нему по беспроводной сети
- Мультиплатформенность - поддержка любых устройств с возможностями работы посредством беспроводной связи.
- Портативность - размер чуть больше кредитной карты и толщиной в два пальца, весом не более 150 г. с возможностью автономной работы до 7 часов.
- Поддержка популярных стандартов мультимедиа, сетевых протоколов и продуктов.
- Поддержка функций - "предосмотра" популярных мультимедиа файлов, установки фильтров и других "плюшек", без которых невозможно представить удобную работу с хранилищем фалов.
- Многопользовательность - создание и распределение прав доступа для пользователей.
- Легкая управляемость и настройка - "дружелюбный" web-интерфейс управления сервером и файлового менеджера.
- Доступность для частного использования - лицензии используемых программных решений предоставляют свободу действий и бесплатность для частного использования.
- Дополнительно поставлены задачи - разработка и изготовление корпуса с обеспечением защиты класса IP67, увеличение емкости аккумулятора, использование устройства в качестве PowerBank, разработка и внедрение собственных решений аналогичных продуктам Ajenti и FileRun, повышение скорости и дальности действия Wi-Fi сети, обеспечение резервирования и шифрования данных пользователей. Более того, возможно у τAURUS появится собственный сенсорный экран и полноценная светодиодная индикация.
Использование.
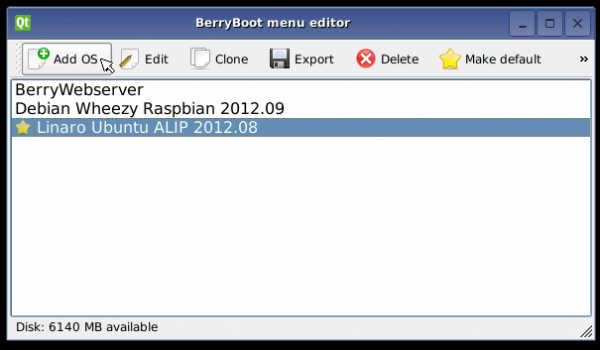
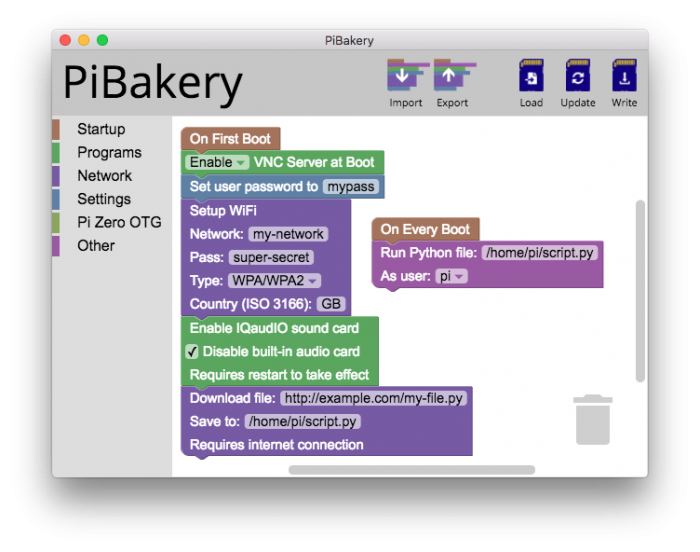
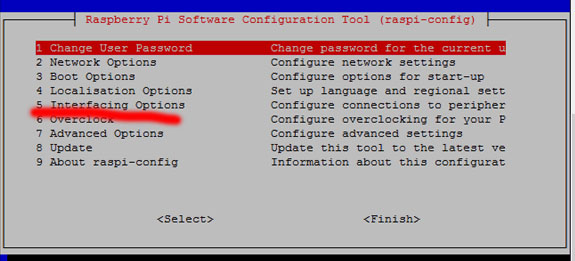
1 шаг. Включение. После выполнения нашей инструкции по конфигурированию сервера подаем питание на Raspberry Pi 3 и ждем примерно 15 с пока станет доступной Wi-Fi сеть «MyCloud».
2 шаг. Подключение. Подключаемся к точке доступа «MyCloud», пароль (по умолчанию) вводить не нужно, сеть имеет открытый доступ. После подключения на вашем смартфоне автоматически появляется стартовая страница MyCloud.pi, аналогично произойдет при открытии браузера на вашем ноутбуке или компьютере.
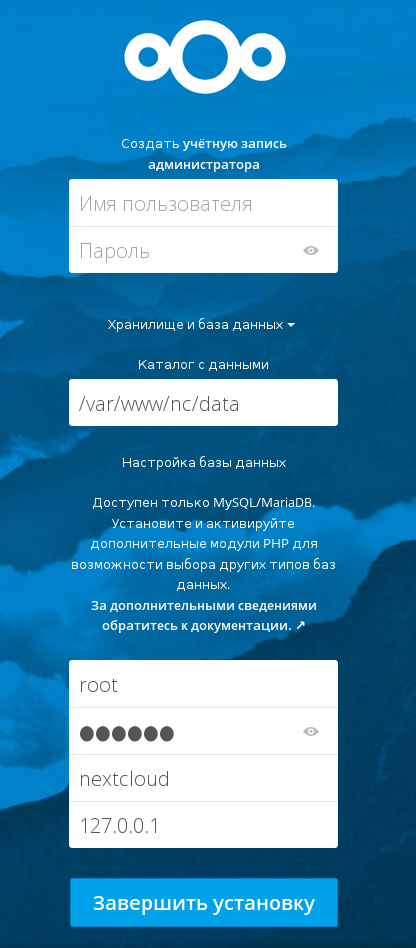
По умолчанию загрузится интерфейс FileRun, однако если на используемой flash карте (заранее отформатированной с меткой SERVER) разместить по пути «www/html/» ваш web проект, то при загрузке будет подхвачен именно ваш index.html/php файл. Используя адрес «mycloud.pi:8000» мы перейдем на страницу доступа панели управления сервером Ajenti.Введя пароли доступа мы попадаем на вашу учетную запись менеджера FileRun или панели управления сервером Ajenti.
3 шаг. Работа. После прохождения авторизации мы получаем самое вкусное.
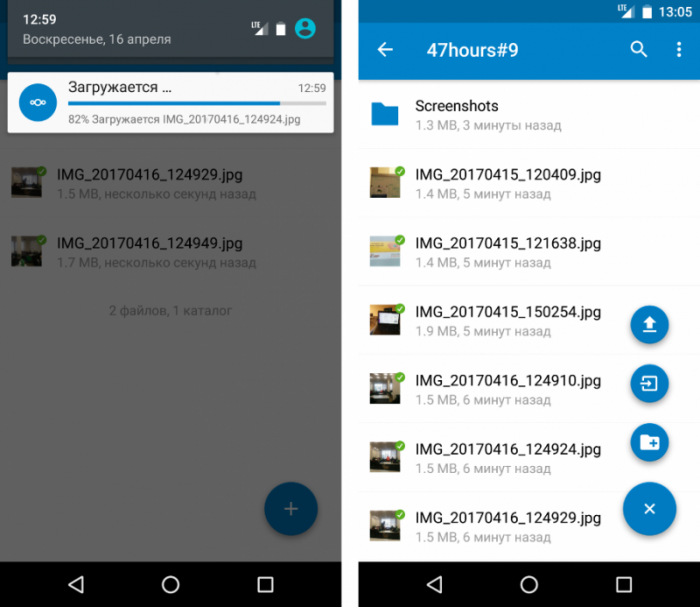
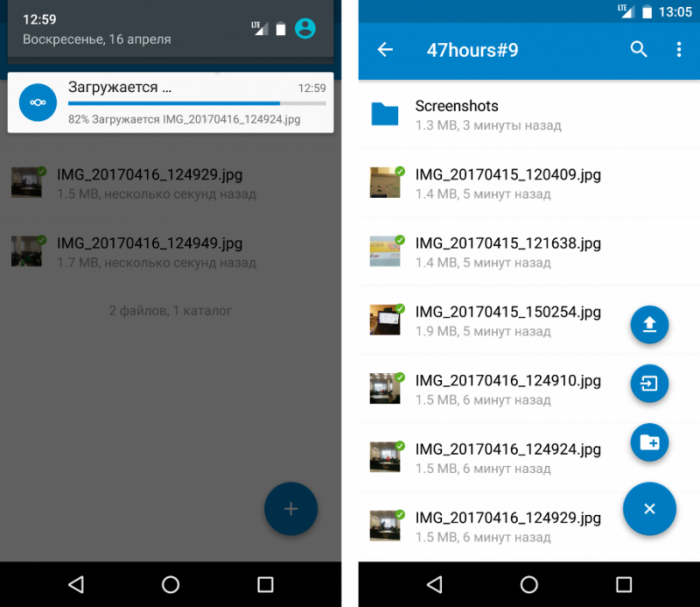
В случае с FileRun мы получаем PHP файловый менеджер с поддержкой русского языка для совместного использования файлов, которое позволяет организовывать, просматривать и редактировать файлы. FileRun можно использовать для хранения и просмотра документов, фотографий, музыки и других файлов.
Весь багаж возможностей FileRun вы можете оценить на сайте http://www.filerun.com.
В случае с Ajenti мы получаем мощный инструмент управления сервером с понятным и красивым интерфейсом, который, как и FileRun обладает поддержкой русского языка. Более подробно на http://ajenti.org.
Примечания
tAURUS - Название собрано из нескольких символических кубиков: τ – 19 буква греческого алфавита, часто обозначающая время релаксации, τAU – полное название все той же самой τ, rus – намекает на страну разработчика, ну и полное сочетание τAURUS - относит к астрономии древнего Вавилона к знаку зодиака тельцу, в год которого родился основатель проекта
PirateBox – устройство на платформе Raspberry PI для беспроводного обмена файлами с функциями чата и форума
Испытания
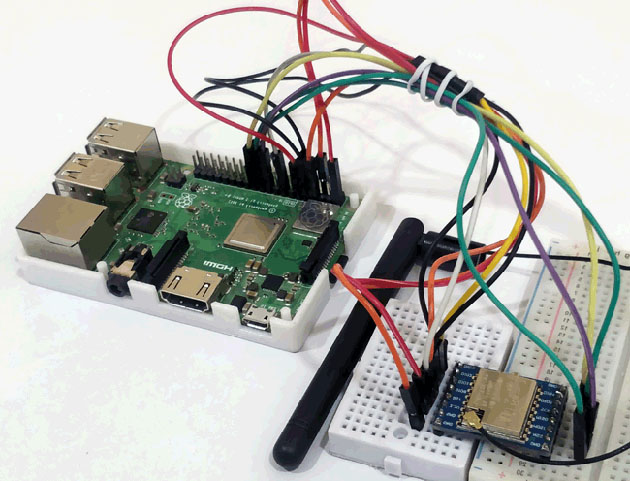
Мы пока только планируем провести ряд полноценных тестов на скорость, длительность работы при различной загрузке, температурные тесты и т.п.. На данный момент скорость загрузки файлов на tAURUS достигает 3,5 Мб/с, а чтения 1 Мб/с (что конечно пока достаточно мало). Предварительный анализ показал неутешительную работу интегрированного в Raspberry Pi 3 Wi-Fi модуля, переход на внешний USB Wi-Fi адаптер надеемся позволит улучшить картину.
Тесты на скорость обмена данными с использованием LAN интерфейса показали значения 10 – 11 Мб\с на запись и 6 – 10 Мб\с на чтение.
Результат.
На выходе мы получили беспроводной накопитель, оптимизированный для мобильного образа жизни. Он позволяет наслаждаться всем набором мультимедиа — видео, музыкой, фотографиями и привычными вам файлами, куда бы Вы ни пошли, устраняя ограничения планшетного компьютера или смартфона по объему памяти. Он является отличным выбором для тех, кому необходимы возможности хранения и потоковой передачи данных. τAURUS не нужны проводные подключения к домашней сети. Вы, ваша семья, коллеги, деловые партнеры, студенты получают инструмент одновременного беспроводного использования хранилища с функциями полноценного сервера посредством своих гаджетов. Удобный web-интерфейс позволяеN обращаться пользователям к τAURUS без специальных знаний пользования и управления серверами. Более того, τAURUS является неплохим помощником дизайнеров, верстальщиков, тестировщиков и архитекторов web-страниц любой сложности.Полностью бесплатную инструкцию вы можете получить на ресурсах MyTaurus.ru и MyCloudBox.ru.
Планы.
Проект предлагается развивать совместно с raspberry энтузиастами на площадках MyTaurus.ru и MyCloudBox.ru.
В ближайшей перспективе запланировано проведение расширенных тестов сервера и его доработка путем применения внешнего USB Wi-Fi адаптера для увеличения радиуса и скорости работы беспроводной сети.
Приоритетные задачи - разработка и изготовление корпуса с обеспечением защиты класса IP67, увеличение емкости аккумулятора, использование устройства в качестве PowerBank, разработка и внедрение собственных решений аналогичных продуктам Ajenti и FileRun, обеспечение резервирования и шифрования данных пользователей. Более того, возможно у τAURUS появится собственный сенсорный экран и полноценная светодиодная индикация
")



")