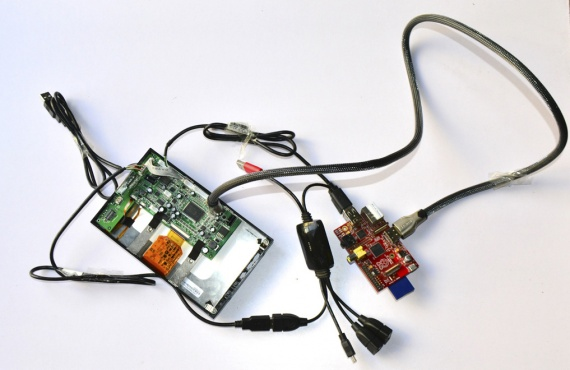
Набор модулей для сборки автомобильного компьютера.
Базовым программным обеспечением является адаптированный Raspbian Linux со специальной мультимедийной оболочкой-интерфейсом, написанной на Qt5, которая запускается автоматически после загрузки операционной системы. Помимо стандартного программного обеспечения, можно использовать ПО сторонних разработчиков (например XBMC Car PC edition).
Базовый набор модулей включает в себя
- Сенсорный экран 7`` с HDMI-интерфейсом и стандартным 2DIN корпусом
- 4x50W усилитель (чип TDA-7850)
- Модуль FM радио с адаптером для подключения к усилителю
- GPS модуль + GPS антенна
- Кабель ISO-10487
- Кнопка-ключ с проводами
- Активный USB хаб
- Конвертер 12V-5V с разъёмами для питания RaspberryPi и активного USB-хаба
- Переходник и аудиокабель для подключения RaspberryPi к усилителю
- HDMI кабель
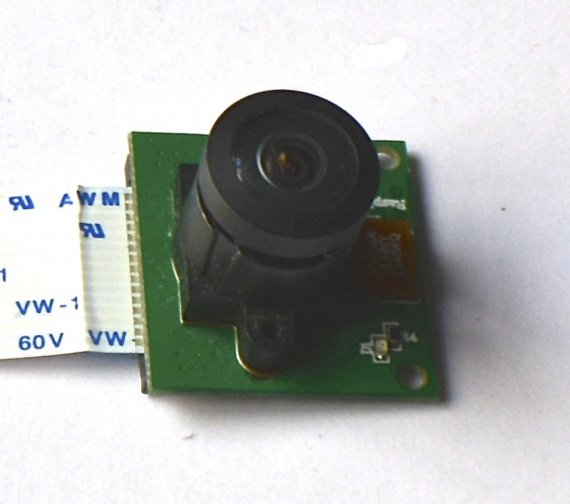
- CSI-Камера с широкоугольным объективом
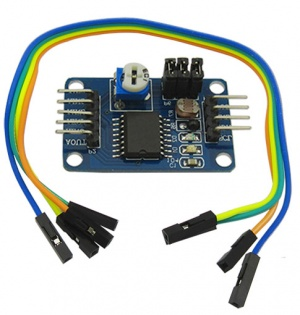
- OBD-II адаптер ELM327
- Кроме этого к компьютеру можно подключать дополнительные модули по USB - Wi-Fi приёмники, 3g/4g модемы и т.д
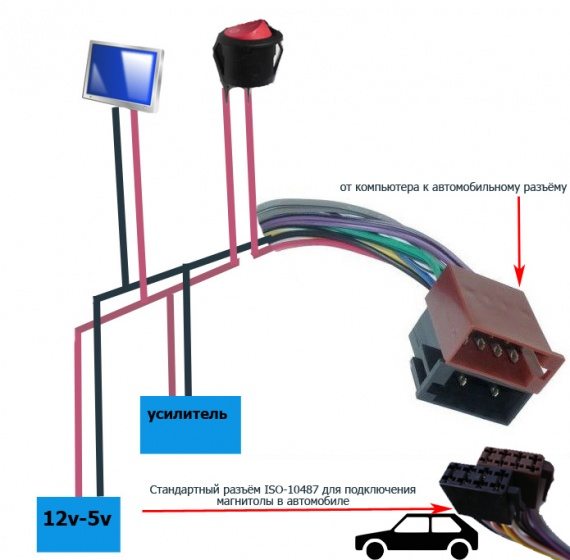
В качестве разъёма для подключения в автомобиле выбран стандартный разъём ISO-10487. Таким образом, если в вашем автомобиле разъём для подключения аудиоаппаратуры отличен от ISO-10487, вы можете без проблем приобрести переходник в интернет-магазинах.
Сборка
Питание
Все модули компьютера получают питание через провода +12V (красный провод), GND (чёрный) стандартного разъёма ISO-10487, к которым они подключены параллельно. В разрыв красного провода разъёма вставляется кнопка-ключ.
Питание необходимо для:
- Преобразователя 12V-5V, который питает Raspberry Pi и активный USB-хаб.

- Сенсорного экрана
- Усилителя
Звук
4-канальный усилитель подключается к проводам разъёма ISO-10487.
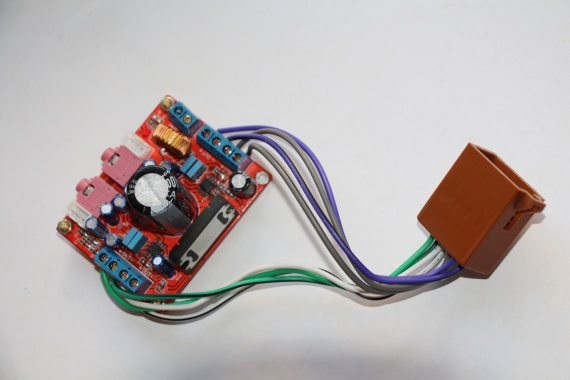
На входы усилителя подаются аудиосигналы сигналы от Raspberry Pi и от FM-приёмника. Управление громкостью звука программное.
Подключение FM-приёмника к усилителю:
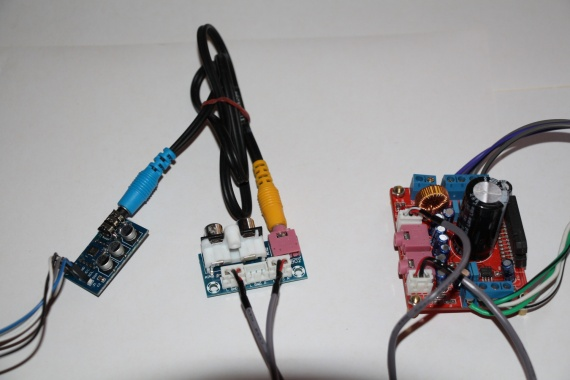
Подключение Raspberry Pi к усилителю: .
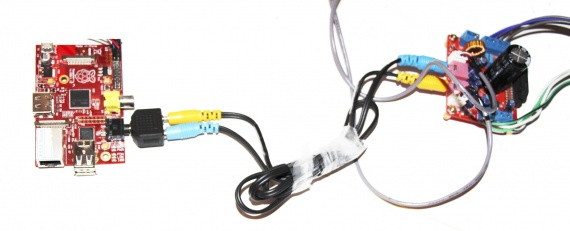
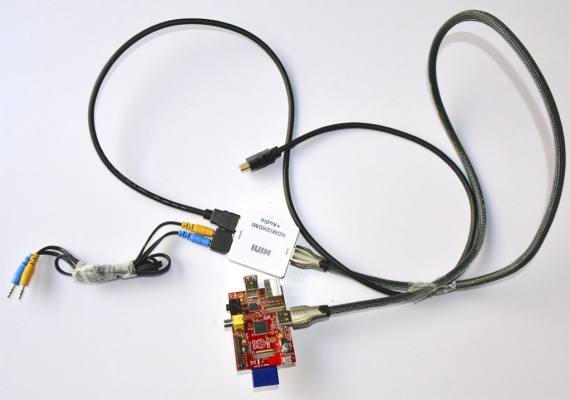
В связи с тем, что звук с аналогового аудиовыхода Raspberry Pi может оказаться не очень качественным, можно брать цифровой аудиосигнал с HDMI выхода Raspberry Pi и преобразовывать его в аналоговый при помощи конвертера HDMI-HDMI+audio. В этом случае конвертер будет питаться от USB-хаба.

Подключение устройств к Raspberry Pi
К Raspberry Pi подключаются следующие устройства:
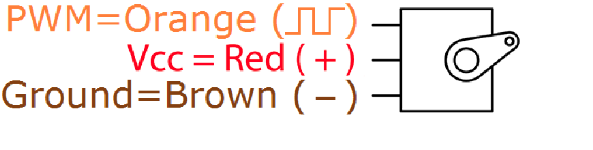
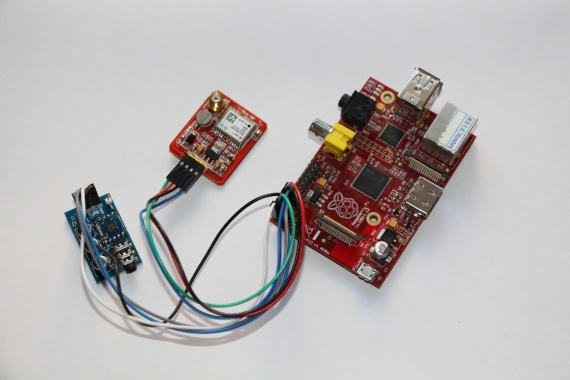
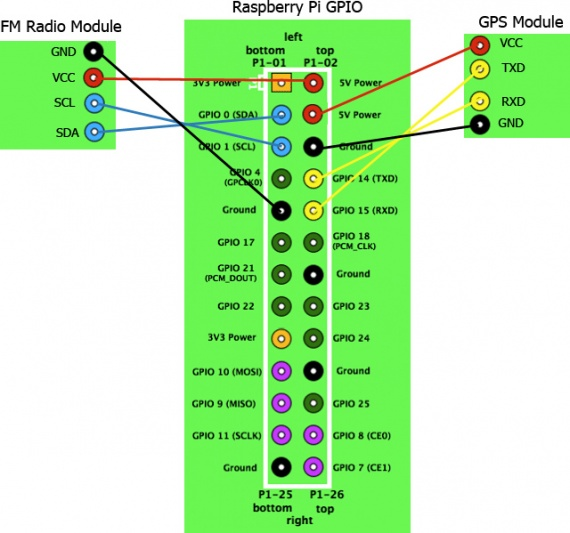
- FM приёмник (к GPIO пинам SDA,SCL,VCC,GND)
- GPS (к GPIO линиям RX, TX, VCC, GND)
-
К USB входам Raspberry Pi подключается USB-хаб и один из USB-разъёмов экрана, который обеспечивает работу сенсора
-
Экран подключается посредством HDMI интерфейса. На лицевой панели экрана имеется USB-вход. Для того, чтобы он работал, необходимо подсоединить USB-шнур №2 экрана к USB-хабу
- Подключение камеры. Стандартная камера с широкоугольным объективом используется в качестве видеорегистратора. Выводится на лобовое стекло при помощи удлинителя.
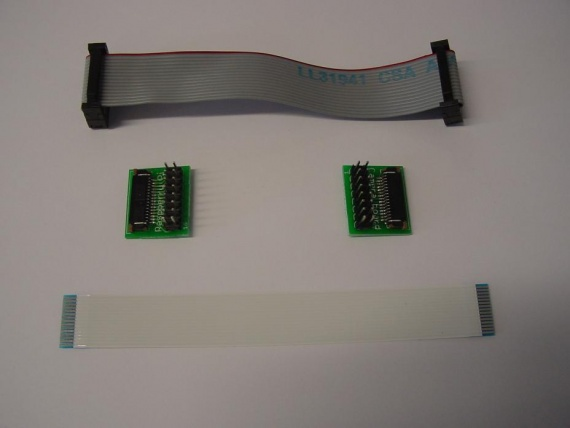
Принцип работы удлинителя:
RasPi -> CSI-кабель -> переходник с CSI на IDC -> IDC кабель (можно сделать любой длины) -> переходник с IDC на CSI-> CSI кабель -> камера
- Для диагностики ЭСУД и чтения параметров работы двигателя и систем автомобиля используется адаптер ELM-327, который подключается к OBD-II разъёму в автомобиле

Завершение сборки
После того, как все компоненты соединены необходимо уложить их в стандартный 2DIN корпус.

На чип усилителя рекомендуется установить радиатор. Так как радиатор будет нагреваться во время работы усилителя, убедитесь, чтобы при установке в машине он не соприкасался с проводкой автомобиля.
Для того, чтобы вывести кнопку-ключ на лицевую панель, необходимо извлечь любую из кнопок-заглушек в левой части экрана.

Программное обеспечение
Базовым программным обеспечением является адаптированный Raspbian Linux со специальной мультимедийной оболочкой-интерфейсом , написанной на Qt5, которая запускается автоматически после загрузки операционной системы. Помимо стандартного программного обеспечения, можно использовать ПО сторонних разработчиков (например XBMC Car PC edition). ПО записывается на карту-памяти SD
Основные возможности
Главный экран
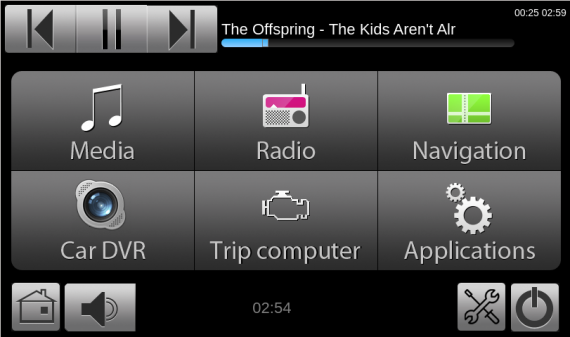
Это главный экран интерфейса - то, что вы видите после того, как загрузилась операционная система и оболочка автоматически запустилась. К этому экрану можно вернуться в любой момент, нажав кнопку "
После нажатия на кнопку выключения приложение закроется и вы увидите рабочий стол операционной системы с иконками для запуска различных приложений, например терминала
В центральной чаcти экрана 6 больших кнопок для перехода в соответствующие разделы приложения: Media, Radio, Navigation, Car DVR, Trip Computer
Кнопка Applications пока не активна.
В верхней части интерфейса расположен аудиоплеер, который отображается всегда в верхней части приложения.
Для загрузки нового плейлиста нужно перейти в раздел "Media"->"Media Audio".
FM радио

Интерфейс FM радио. Для перехода к интернет-радио нажмите кнопку "Internet radio" в верхнем правом углу экрана.
Интерфейс разделён на 2 части - левая часть содержит информацию о текущей радиостанции и кнопки управления, правая часть - список избранных радиостанций.
Верхний аудиоплеер останавливает воспроизведение, когда вы выбираете радиостанцию из списка избранных или начинаете поиск новой станции.
Интернет радио
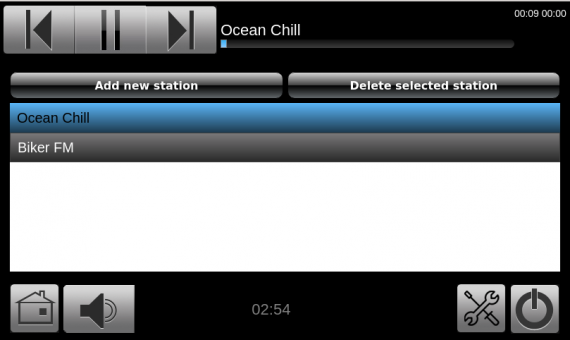
Для прослушивание интернет радио необходимо подключение к интернету.
Вы можете использовать Wi-Fi приёмник для подключения к беспроводной сети либо 3g/4g usb модем
Нажмите кнопку "Add new station", чтобы добавить новую станцию. После ввода названия станции и адреса потока станция появится в списке.
Для удаления станции нажмите кнопку "Delete selected station"
Вы также можете переключаться между станциями нажимая кнопки "Следующий/Предыдущий" в верхнем аудиоплеере
Медиацентр

Медиацентр состоит из 2 частей - Media Audio и Media Video.
Раздел Media Audio предназначен для просмотра аудифайлов и их добавления в плейлист аудиоплеера.
Чтобы выбрать папку с аудиофайлами нажмите кнопку "Select audio folder". После выбора папки нажмите кнопку "Scan folder".
Найденные аудиофайлы в выбранной папке и вложенных папках отобразятся в списке и будут добавлены в плейлист аудиоплеера.
Медиацентр основан на backend'e gstreamer.. Все популярные аудиоформаты поддерживаются по умолчанию. Если нужный аудиоформат не поддерживается просто скачайте соответствующий плагин к gstreamer'у из репозитория для обеспечения поддержки формата.
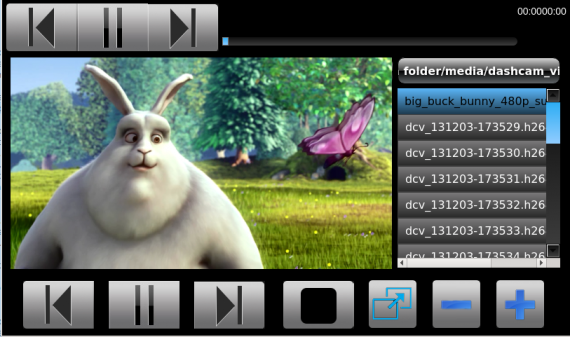
Раздел Media Video предназначен для просмотра видеофайлов (включая видеофайлы, записанные автомобильным видеорегистратором). Видеоплеер основан на OMXPlayer, который поддерживает аппаратное видеоускорение. Кнопки управления позволяют Воспроизводить/Останавливать/Ставить на паузу видео, перематывать вперёд/назад, регулировать громкость, открывать полноэкранный режим.
Видеорегистратор
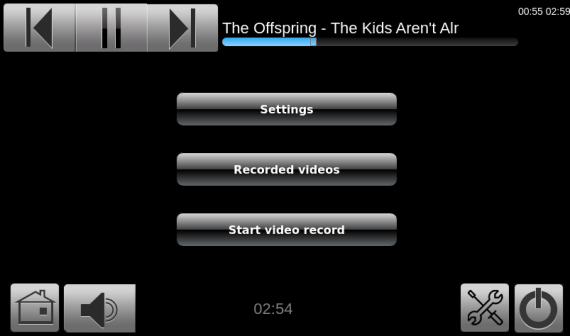
Для начала записи нажмите кнопку "Start video record"
Для просмотра записанных видеофайлов нажмите кнопку "Recorded videos"
В разделе "Settings" можно задать
- Папку для записи видеофайлов
- Максимальный размер папки для записи (при достижении лимита старые файлы будут перезаписываться новыми)
- Продолжительность 1 видеофайла (по истечении этого времени начнётся запись нового видеофайла)
- Битрейт
- Видеоразрешение
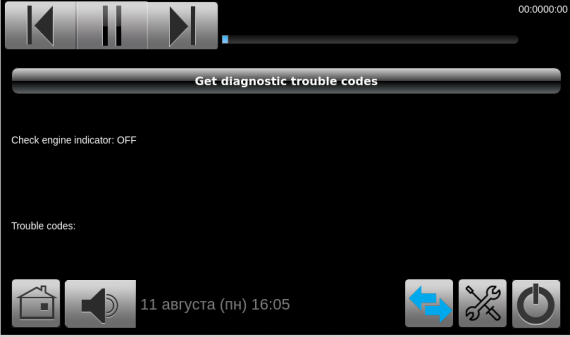
Бортовой диагностический компьютер
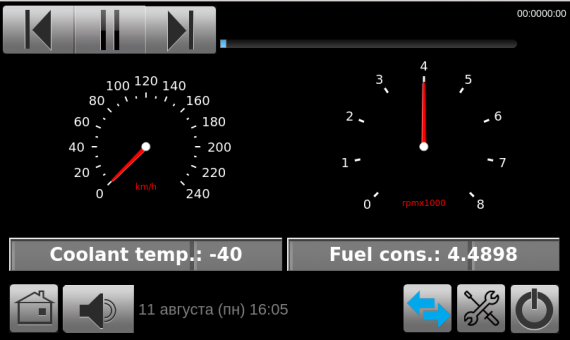
Бортовой диагностический OBD-II компьютер показывает параметры различных систем автомобиля - температуру охлаждающей жидкости, скорость, обороты двигателя, расход топлива, расход воздуха, напряжение на датчиках кислорода и т.д
Также может показывать диагностические коды ошибок
GPS навигация

В качестве программы GPS навигации используется Navit.
Вам нужно вырезать нужный регион из карты OpenStreet при помощи сервиса http://maps5.navit-project.org/ и сохранить его как /usr/share/maps/MyMap.bin file
Конфигурационный файл Navit'а - /etc/navit/navit.xml позволит легко кастомизировать программу по этим инструкциям - http://wiki.navit-project.org/index.php/Configuration
Настройки
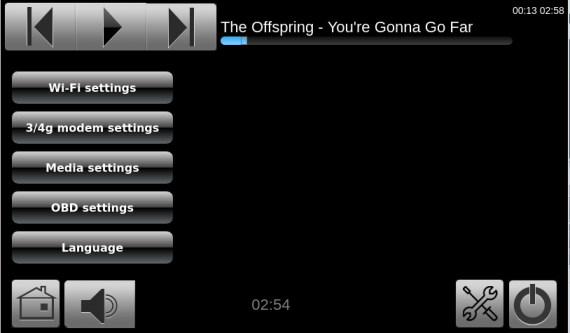
- Wi-Fi Settings - список доступных беспроводных сетей. Для подключения нажмите кнопку "Connect" напротив нужной сети и введите пароль для установки беспроводного соединения.
- Modem settings - настройки 3g/4g modem. Введите APN логин, APN пароль (если требуется), адрес APN точки доступа и нажмите кнопку "Connect" для соединения с мобильным интернетом.
- Media settings - настройки медиацентра. Здесь можно задать форматы файлов, которые будут распознаваться как медиаконтент.
- OBD settings - настройки диагностического бортового компьютера.
- Language settings - Выбор языка интерфейса. Доступны английский и русский.
Где скачать?
ПО будет доступно для скачивания в конце этой недели.
Альтернативное программное обеспечение
В качестве альтернативного ПО можно использовать сборку медиацентра XBMC Car PC edition
https://drive.google.com/folderview?id=0B__Rs5JF53-kVk03SGQ5OWY4Z0k&usp=sharing#list
Список альтернативного ПО будет пополняться.